
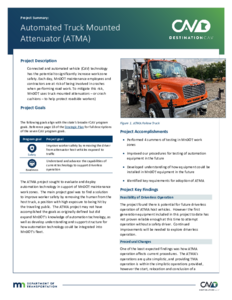
Project Summary: Automated Truck Mounted Attenuator (ATMA)
Image
Date Created
2025
Report Number
2025-26
Description
Project Summary: Community Driven CAV
Image

Date Created
2025-02
Report Number
2025-20
Description






Assessment of Pedestrian Safety and Driver Behavior Near an Automated Vehicle
Image
Date Created
2024-01
Report Number
2024-02
Description